|
脈衝驅動機構結合線性馬達之長行程奈米級驅動 |
 |
|
 |
|
一、目的及其重要性:
近幾年,隨著光電、通訊、半導體、生物科技等產品之精密化、微小化的趨勢,其零件精密細微,在檢查、組裝貨檢查時,所要求的定位精度極高。現今熱門的資訊及通訊相關產品,如小型照相機、光學式掃描機、攝影機,光碟機等,不僅其外觀體積達到小型化,其內部更是隱藏著許多高精密的小零件。這些精密細微的零件在組裝作業時,必須先將零件先鎖緊至半固定狀態,以便調整其輸出信號至最佳值後,再以螺絲強力鎖固或以UV硬化法固定之。但是零件在半固定狀態時,有如下問題點:
(1)零件小,不易作業。
(2)零組件在半固定狀態時,很難再微動。
(3)零組件調整到在精確位置後,以強力固定時,位置又易跑掉。
(4)若利用傳統伺服機構定位,因鎖固的滑動面上存在著極大的摩擦力,難以克服“黏著--滑動(Stick-Slip)”的問題。
而設計組裝零件之機台,一般均會運用伺服馬達及滾珠螺桿所構成的移動檯,但隨著產品的微小化趨勢,所要求的定位精度越來越接近傳統定位機構之解析度的上限,且因伺服馬達及滾珠螺桿所構成的定位機構,欲達到如此高的精密定位精度,需克服螺桿所造成的被隙與摩擦等傳統控制難題。因此,目前此類組裝作業大多仰賴熟練技術士,拿著小榔頭邊敲零組件,邊預測新位置,最後再加以鎖固,以致生產效率低落。故欲提升生產效率,現場急需此類組裝作業的自動化。但基於上列所述困難,此項精密組裝作業,很難利用傳統伺服機構或夾具達到自動化。
針對上述精密組裝作業,本實驗室所著眼之研究方向為脈衝驅動裝置(壓電元件)與線性馬達所組成的驅動器,以達到快速及精確定位的目的。實驗室將此研究方向定名為「脈衝驅動機構及線性馬達組成之長行程奈米級驅動器之控制與研製」,其驅動方式為在線性馬達之動子部(移動平台(Mover))上加裝脈衝驅動裝置,如此可使線性馬達控制系統能達到長行程的驅動並能表現高精密定位能力的目的。亦即,利用線性馬達驅動移動平台做長行程以及快度的粗略定位,當移動平檯到達目標位置附近時,改以脈衝驅動裝置驅動移動平檯使其達到高精密的精細定位。此驅動方式除可有線性馬達長行程移動範圍的優點外,更能突破現有線性馬達的使用範圍,使其能應用至高精密要求的產業上,預估精度可達到次微米以下,甚至達到奈米(此精度將受限於移動平檯的剛性以及作業環境的因素)之超高精度的範疇。 |
| |
|
二、 原理:
2.1線性馬達
線性馬達一詞中所指的“線性”,並不是數學中所提之線性函數,或是代表其它任兩個物理量之間的轉換關係為線性,而是僅指此種馬達的運動方式為直線的運動,不同於平常所見傳統馬達旋轉的運動方式,而一線性馬達的基本概念即是將旋轉式馬達從圓心沿半徑切開,展開來攤成平的一直線,就會得到相對應於該旋轉式馬達的線性馬達,圖1 為本實驗室所採購之橫河電機磁阻線性馬達與其驅動器示意圖。
|
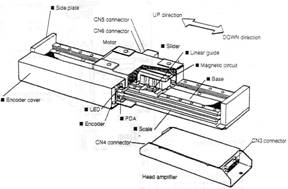 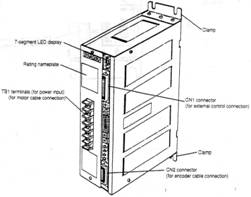
圖1、橫河電機線性馬達與其驅動器
|
| |
2.2壓電元件
壓電元件,是指具有壓電特性的材料,壓電特性就是當材料通入一直流電壓時,材料的兩端會產生一個形變,形變的大小會隨著輸入的電壓大小而不同,電壓愈大形變愈大。具有壓電效應的材料如:聚合物之PVDF、複合材料的壓電元件PLZT、PBLN…等。如圖2所示長方形綠色物體,是本實驗室所使用之陶瓷結構的壓電元件,此壓電元件(piezoelectric element)預估一次驅動之時間為10ms,即一秒內可驅動一百次,最大速率可達100μm/s以上,所以即使沒有線性馬達的幫助,只使用壓電元件來作動,它的反應速度也是很快的。
|
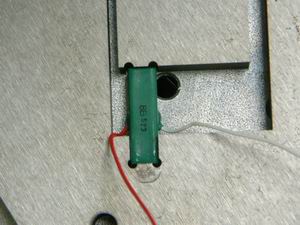
圖2、壓電材料實體圖
|
| |
壓電性基本上是屬於機械能和電能間,能量轉換的一種現象。由於壓電材料受到外力作用所產生的電荷是與外力的大小與方向有關。當電荷產生時,即形成電場與電壓,在受到拉應力(Tensile Stress)與壓應力(Compressive Stress)時,其電場與電壓的方向恰好相反。此一現象亦是可逆的,亦即當壓電材料受到不同極性的電場時,將會導致其長度的增減。所以壓電效應可包括正電效應及逆電效應。(a)正壓電效應:當施一機械應力於壓電材料時,材料的兩端會伴隨產生一個電荷,其電荷的大小與施加應力大小成一比例。當施加應力方向相反時,電荷極性亦會變成相反。(b)逆壓電效應:當一直流電場加於壓電材料之兩端,材料會產生一個型變,其變形量會隨電場的大小而有所改變。但當加入一交流電場時,材料的變形方向也隨著電場正負變化而做縮收、拉長的交互變化。如果交流電場頻率等於材料的自然共振頻率,此時材料會產生共振現象,而導致壓電材料產生最大的變形量。
2.2.1僅驅動IDM壓電元件時之靜態特性及動態特性
此實驗之目的乃為確認滑動平檯最佳的定位精度,以及測試滑動平檯最終的收斂速度。所謂靜態特性為單次驅動壓電元件時的移動特性,而動態特性為連續驅動壓電元件時的移動特性。
|
|
| |
如圖3所示,當在靜止的狀態,將線性馬達之移動平檯(Mover)及馬達之動子部之部分零組件視為摩擦力支撐的移動體(即Mass部分),而慣性體(即Weight部分)為附著於壓電材料另一端之質量塊。此時即可將定位機構視為一簡化之脈衝驅動機構,具左右微動的功能。其驅動原理,參考圖4之驅動原理,描述如下:
(a)驅動前壓電元件是在收縮的自然狀態。
(b)施於壓電元件瞬間膨脹的電壓波形使其產生衝擊力,並克服作用在滑動平檯上的摩擦力,使移動體M及慣性體m分別向左及向右移動。
(c)以緩慢的電壓波形控制壓電元件收縮,此時控制慣性體的收縮速率為定速,因加速度為零不產生慣性力,所以受摩擦固定的移動體可保持在已移動後的位置上。
(d)當壓電元件收縮至其原來尺寸的瞬間,因為供給驅動電壓降為零,慣性體的收縮動作會突然停止,此時慣性體產生之慣性力會敲擊移動體使其再次微動。
(e)當壓電元件收縮至其原來尺寸後,即完成單次的驅動動作。另外,驅動滑動平檯向右微動之驅動原理,與上述原理相似,唯開始之步驟中,壓電元件是在膨脹的狀態。
|
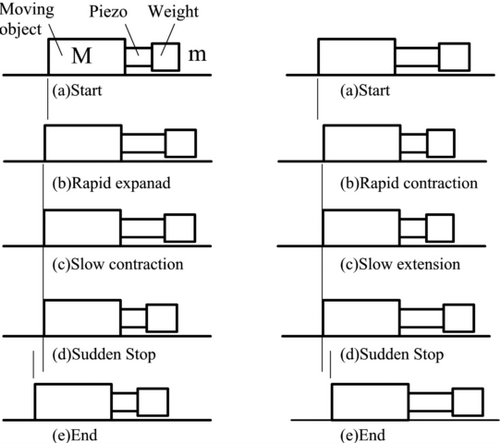
向左移動 向右移動
|
| |
利用上述之驅動原理,滑動平檯可達到極為精確的微動步幅。若連續驅動滑動平檯向左,則重複施於壓電元件相同的電壓波形,可獲得良好的動態移動特性。根據IDM驅動裝置的實驗結果報告,分解能可達1奈米,定位精度可達10奈米。
|
| |
2.2.2 驅動特點
此組合式驅動器之特點整理如下﹕
(1)利用壓電元件的高頻率響應的特性所產生的衝擊力,能驅動受強力摩擦力固定的目標物體,或質量大的目標物體。
(2)利用線性馬達的長行程特性,克服壓電元件僅有微小位移的缺點,可擴大目標物體的作業範圍。
(3)此組合式驅動器,是完全以電氣來驅動,因此易於控制。
由於線性馬達的特性,故可利用加長導軌的方式彈性的增加移動行程。
2.3實驗流程與軟硬體設備
|
|
| |
三、工程應用:
以線性馬達驅動的精密系統:
利用一般旋轉型馬達的轉子、定子與氣隙作直線的展開,以電能直接轉換為直線動能的推力裝置,功能上作為致動器。並可應用於磁浮列車、自動倉儲庫系統、真空環境下進行半導體遮罩修補或晶圓之傳送、x-y繪圖機、印刷電路板的組裝、切割機構、繞線機構、磁碟機、光碟機讀寫頭、自動化製造等。
以壓電材料驅動的精密系統:
壓電致動器擁有體積小、反應快、高出力、生熱最低、控制容易等多方面的優點。雖然壓電元件受本身材料遲滯現象(Hysteresis)的影響,在位移上並非呈現完全線性的表現,藉由回授控制後,仍擁有0.01mm 左右的精度,因此在致動器的選用方面,壓電材料為目前一般微動精密系統控制常用的致動器。其應用很廣,例如:(1)超音波馬達的研發。(2)應用於雷射光反射鏡的動態分析與運動控制。(3)原子力顯微鏡(AFM)的應用以發表在ASME期刊上,例如表面工程的量測,生醫材料彈性勁度的量測等。
線性馬達與壓電陶瓷耦合致動器系統:
兩段式致動器的發展,亦可利用氣壓系統或彈簧元件,搭配壓電元件來組成;但以線性馬達與壓電元件耦合致動器系統,最能夠達到長行程且快速反應的目標。精度亦均可達到 。 。 |
| |