 |
機電整合的精密系統 |
 |
|
 |
|
為因應自動化時代的潮流趨勢,許多機械電機整合的偶合系統相繼產生,利用機構去完成某個特定動作,並利用致動元件驅動是自動化機電整合的基本要求。因此如何整體考量設計整個系統,以發揮最佳效應,成為一個重要的課題。馬達為應用較普遍的一種致動元件,從馬達本身構造上的理解,到如何選擇一個適當的致動器,使其得與機構設計互相匹配,而不影響機械效率,是進行機電整合研究時最重要的考量因素。
有關於機電整合的研究主要是配合實驗計劃的方式進行,目前已完成織帶捲取機構進行張力與速度的精密控制,此計劃主要在探討捲取系統的線上(on-line)自動化,以節省大量的人力與時間。實施內容包括硬體模型與電路設計,軟體撰寫,實驗模擬結果與分析。控制的部分則是經由張力計所量測與欲控制之張力及速度做比較,然後再以誤差值和其變化量為輸入,並使用FUZZY PI控制器來作線上的馬達轉速調變,而能有效的控制織帶的張力及速度值。另一項研究計劃是,探討滑塊-曲柄,速回機構用馬達驅動時的動態分析、軌跡追蹤、定轉速或加減速控制,由實驗及數值模擬實際情況,以工業控制器驅動永磁同步伺服馬達作速度或位置的精密控制,並進行運動分析。
執行機電整合研究計劃的具體成果,除了有助於馬達應用在機構的動態方程式推導之外,而且經由理論分析能得知影響此系統之參數變化情形。接著,利用控制器的結合設計出更簡捷的控制方法,並應用於馬達驅動機構的控制上,從而找出此偶合系統的最佳控制設計,在工業自動化上有相當實際應用。
|
|
一、目的及重要性
1. 結合機械領域之機構學、動力學與電機領域之馬達控制理論,發展機電整合之運動控制的研究與實驗。探討出更穩定的機構,來增加工作效率,大幅提升製程品質。並對馬達速度加以控制,改善機構擺動時所產生的撓曲變形與振動,達到預期確切的運動。
2. 機械系統進行可規劃及控制其運動行進軌跡或作用力為目的之研究及技術開發領域皆可視為運動控制的範疇,而運動控制與機電整合技術是相輔相成的,機電整合乃泛指因應精密機構運動之伺服控制,亦即整合機構運動學、伺服驅動器、功率放大器、感測器及微電腦控制器等機械、電機與電子之整合技術。
 |
| |
二、原理應用
1. 利用變分法的Hamilton原理,推導出含有幾何束縛條件的機構動態方程式,其中運動源包含交流伺服馬達、直流伺服馬達、超音波馬達、步進馬達及線性馬達等多種致動器,應用的控制方法包括變結構控制、適應性控制及模糊-類神經網路控制等控制方法。
2. 機構運動控制中,需藉由感測器來描述及偵測機電整合系統運動狀態,常用的感測器包括光感測器(Photo Sensor)、編碼器(Encoder)、溫度感測器(Thermometers)、壓力感測器(Pressure Sensor)、重量感測器(Load Cell)、應變計(Strain Gage)、電流感測器(Current Sensor)、光耦合器(Optocoupler)、極限開關(Limiting Switch)及磁簧開關(Reed Switch)等感測器。
|
| |
三、歷年機電整合之精密系統實驗設備
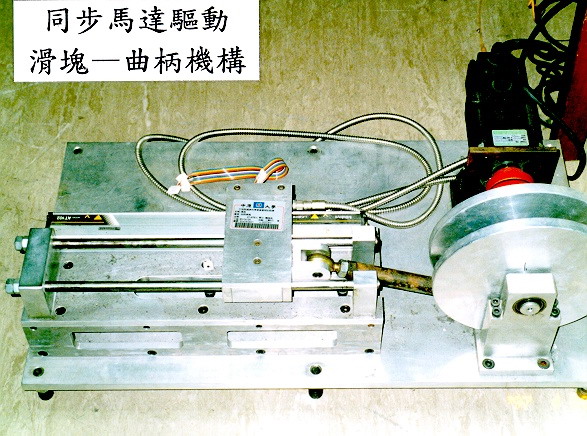
1.滑塊曲柄機構
探討滑塊-曲柄機構利用同步馬達驅動時的動態分析、軌跡追蹤、定轉速或加減速控制,由實驗及數值模擬實際情況,以工業控制器驅動永磁同步伺服馬達作速度或位置的精密控制,並進行運動分析。
 |
| |
|
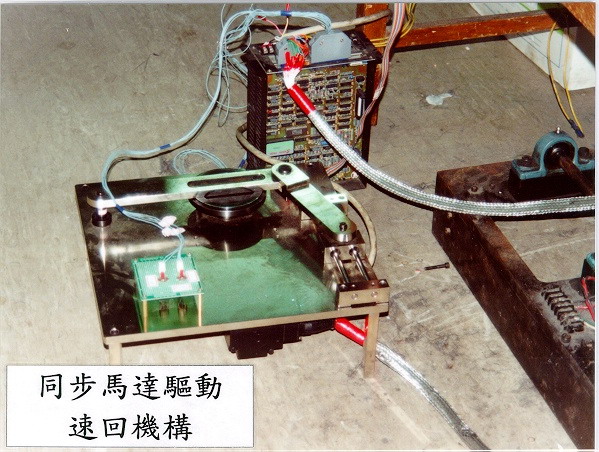
2.速回機構
探討速回機構利用同步馬達驅動時的動態分析、軌跡追蹤、定轉速或加減速控制,由實驗及數值模擬實際情況,以工業控制器驅動永磁同步伺服馬達作速度或位置的精密控制,並進行運動分析。
 |
| |
|
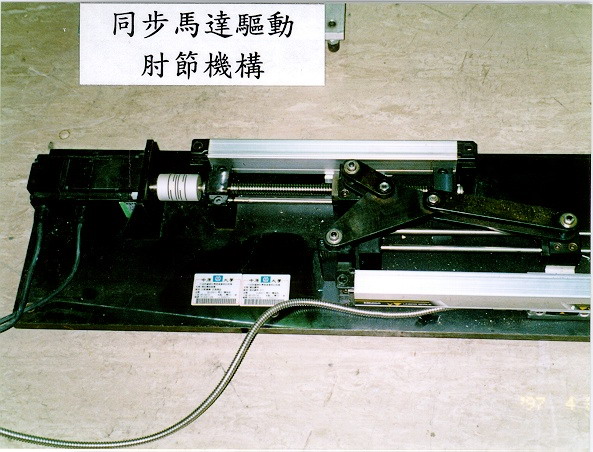
3.肘節機構
探討新型設計之肘節機構(toggle mechanism)的運動分析與靈敏度分析(sensitivity analysis)。由運動分析可得知每個連桿位置、速度及加速度。在數值模擬中,分別以三種不同的運動驅動肘節機構,這三種運動分別為等加速度運動(acceleration)、簡諧(simple harmonic)和擺線(cyclical)運動。
 |
| |
|
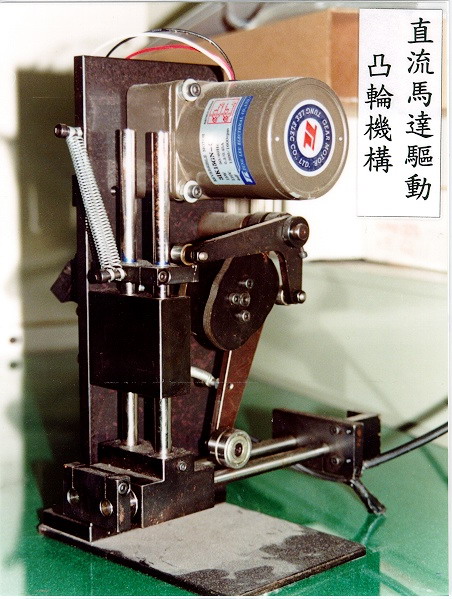
4.凸輪機構
凸輪(cam)為一不規則的形狀的主動機械元件,由直流馬達驅動凸輪,將凸輪的運動傳遞到從動件(follower)上,由從動件之運動狀態與時間的關係,可得位移、速度及加速度與時間關係圖。
 |
| |
|
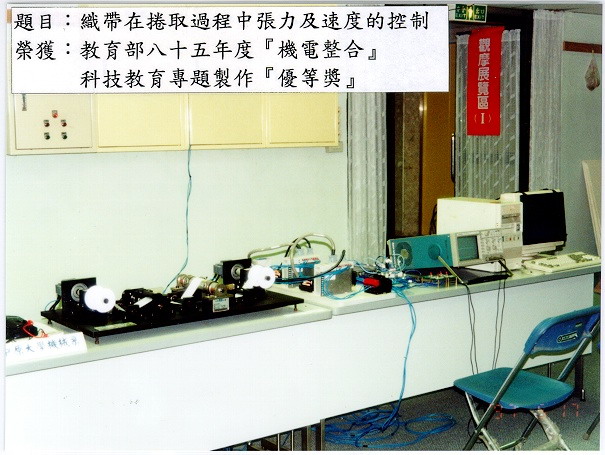
5.織帶在捲取過程中張力與速度的控制
探討捲取系統的線上(on-line)自動化,以節省大量的人力與時間。實施內容包括硬體模型與電路設計,軟體撰寫,實驗模擬結果與分析。控制的部分則是經由張力計所量測與欲控制之張力及速度做比較,然後再以誤差值和其變化量為輸入,並使用FUZZY PI控制器來作線上的馬達轉速調變,而能有效的控制織帶的張力及速度值。
 |
| |
四、目前機電整合運動控制實驗設備
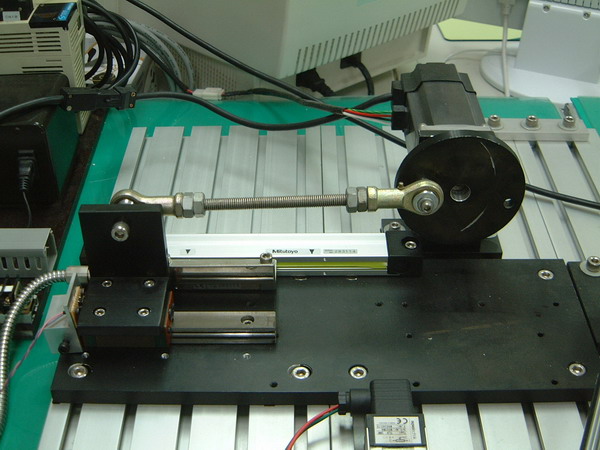
1.滑塊曲柄機構及伺服馬達控制系統
滑塊曲柄機構是藉由永磁同步馬達驅動轉盤,轉盤與滑塊之間有一連桿,由馬達的驅動轉盤帶動連桿及滑塊運動,在運動過程中,轉盤的角度、角速度及滑塊的位置、速度分別由編碼器(encoder)與光學尺(linear scale)測得,由這些運動狀態迴授回PC,由已設計之控制器(controller)控制馬達運動進而對轉盤及滑塊做各種運動狀態之控制,完成滑塊曲柄機構封閉迴路之運動控制。
 |
| |
2.軸節機構及交流伺服馬達
此為一沖切機驅動機構之構造,此機構組合中,計有四組肘節機構(上面二組,下面二組)平行水平面、導螺桿一支、傳送皮帶一條及一組交流伺服馬達,藉由交流伺服馬達驅動傳送皮帶,傳送皮帶驅動導螺桿帶動四組肘節機構,由光學尺測得肘節機構輸出端之運動狀態,由肘節機構輸出端之運動狀態迴授回PC,由設計之控制器(controller)控制肘節機構輸出端之運動狀態,達成肘節機構封閉迴路運動狀態控制。
 |
| |
四、機電整合運動控制工程應用及未來發展
1. 為因應自動化時代的潮流趨勢,許多機械與電機整合的機電整合系統相繼產生,利用機構去完成某個特定動作,並利用各種不同的致動元件驅動機械結構是自動化機電整合的基本要求。因此如何整體考量設計整個系統,以發揮最佳效應,成為一個重要的課題。
2. 機構運動控制為機電整合之一部分,其技術應用非常廣泛,小至微機電系統、數位光碟機,大至半導體製程設備、高速列車,均需藉由機電整合技術完成產品的開發。機電工程之所以重要也正因為它是自動化技術工業、航太工業與國防工業的基礎整合技術。這門新興技術,是先進工業國家競相發展的領域,也是我國邁向二十一世紀科技發展的關鍵。
3. 近年來,由於我國資訊產業的快速發展,也帶動了PC工業控制電腦的發展,連帶著以PC-Based工業控致器為主導的自動化產業, 也結合了國內機械業者,快速的進行著新一波自動化我國的發展。目前我國自動化產業已具備一些突破發展的條件,如能經由政策輔導,進行較大規模的投資,由產業界承接學術界與研究機構所發展的技術,吸收學術界所培育的碩博士級人才,憑藉著我國電子產業的製造技術優勢, 必可發揮臨門一腳的功效,使我國自動化產業登上世界舞臺,扮演日趨重要的角色。 |
| |