地形適應車與機器人整合設計 |
||
|
這方面的研究包括結合機構與機械臂設計的自導電動車ATV
(Adaptive Terrain Vehicle)與行走足式機器人(walking
machine)的設計。ATV搭配模組化車身設計與主動式關節,可改變車身形體以適應不同障礙地形,現有設計包括六輪三節式(WAAV)與四輪擺臂式兩種原形車,具有高度的移動性、障礙穿越能力。並配合ADAMS動態機構分析軟體模擬運動,建立自主移動智慧,在一已知環境中,可根據任意給定目標,自行規劃行進路徑與運動模態的組合,前進至目標處。 未來將以二足式機器人的設計為研究標的,該機器人,除應具有一般平坦地面之前進、後退與轉彎之基本移動能力外,對於障礙如壕溝、高臺、階梯及不可穿越地形,乃至於側傾或跌倒時的回復方式,也應同時考量。本研究將根據計畫對二足類生化機器人的行動能力的要求,搭配平衡控制、機電控制模組(其他子計畫研究成果),進行設計、運動模擬與製作。 |
||
|
|

|
|
| WAAV六輪原型車 |
WAAV概念車(學生專題)攀越階梯 |
|
|

|
|
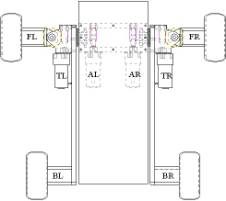
| 四輪式ATV結構組合圖 |
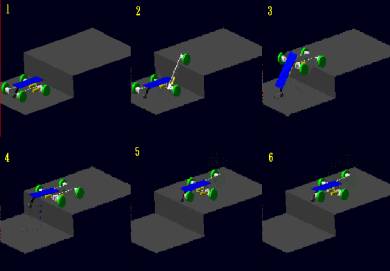
四輪式ATV原形車攀越障礙 |
|
 |
||
| ATV運動模態分析與路線規劃 | ||
|
|
||
|
以動態機構分析系統ADAMS進行 ATV障礙穿越之運動模擬 |
||
| 相關研究成果:發表之期刊、研討會論文 相關研究計畫:三維人體掃描器機構開發─宜昇科技股份有限公司委託計畫 (2000/5~2000/10)、具自我學習能力類生化機器人(動物)研究計畫─分項計畫四組合式機器人(動物)之設計與實作(91-94年整合型計畫申請中) |
||
|
|
||